暂无数据
基于FMI标准的混合时间-事件驱动联合仿真框架研究
原标题:RESEARCH ON A HYBRID TIME-EVENT-DRIVEN CO-SIMULATION FRAMEWORK BASED ON THE FMI STANDARD
5 分
关键词
摘要
随着人工智能、机器学习和机器人技术的快速发展,机器人在各个领域的应用越来越广泛。然而,传统的机器人系统在跨环境操作和多平台协同仿真中的信息同步方面面临挑战,限制了它们在复杂环境中的使用。本文提出了一种基于功能模型接口(FMI)标准的协同仿真框架,充分利用功能模型单元(FMU)的跨平台通用性、操作简便性和双向信息传输能力。通过实现不同仿真模块之间的双向信息同步,并协调时间步进和事件驱动的状态切换机制,该框架实现了高效的模型重用。该框架集成了一种时间事件混合驱动的仿真模式,解决了机器人及其环境在不同平台间协同仿真的挑战,从而提高了开发效率和同步稳定性。此外,通过在动态环境中引入深度强化学习模型,该框架增强了机器人抓取动态物体的能力。实验结果表明,该框架不仅促进了高效的多平台协同仿真,还成功处理了复杂的抓取任务,展示了出色的性能和稳定性。
AI理解论文
这篇论文主要探讨了基于功能模型接口(FMI)标准的混合时间-事件驱动协同仿真框架,旨在解决传统机器人系统在跨环境操作和信息同步方面的挑战。随着人工智能、机器学习和机器人技术的快速发展,机器人在各个领域的应用日益广泛。然而,传统的机器人系统往往局限于特定的操作环境,缺乏在不同环境中协作的灵活性,从而限制了其应用范围和适应性。
研究背景与动机:论文指出,传统的基于规则的方法在面对复杂和动态环境时常常表现不佳。因此,当前的研究重点是通过深度学习技术和计算机视觉来增强机器人在此类环境中的抓取能力。在现代工业背景下,不同的软件平台在处理特定数据形式方面各有优势,因此在真实场景中整合这些数据流以实现协同仿真至关重要。然而,由于模型的高度定制化,模型在不同仿真平台之间的可重用性和可移植性有限,这大大削弱了模型在各种仿真软件中的应用效率。此外,不同仿真系统之间缺乏有效的时间同步机制,导致冗余和操作效率低下。
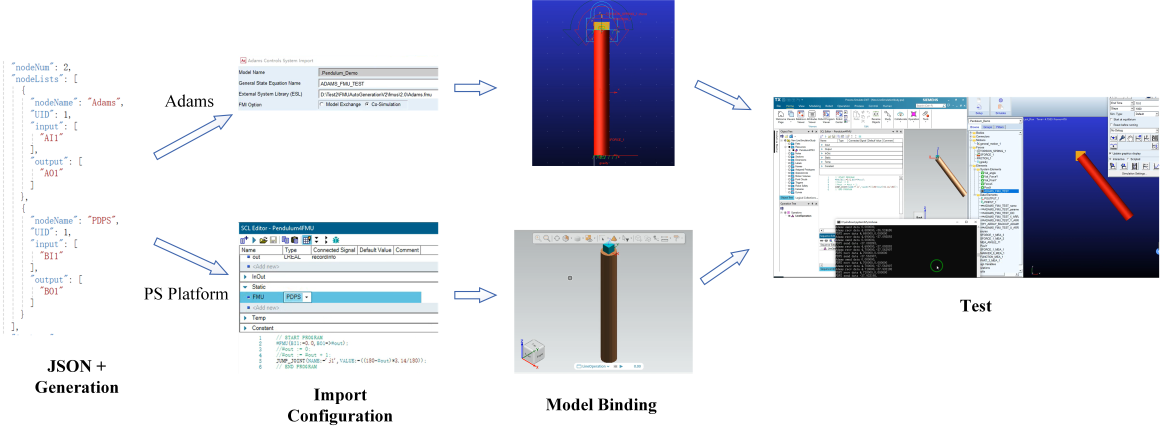
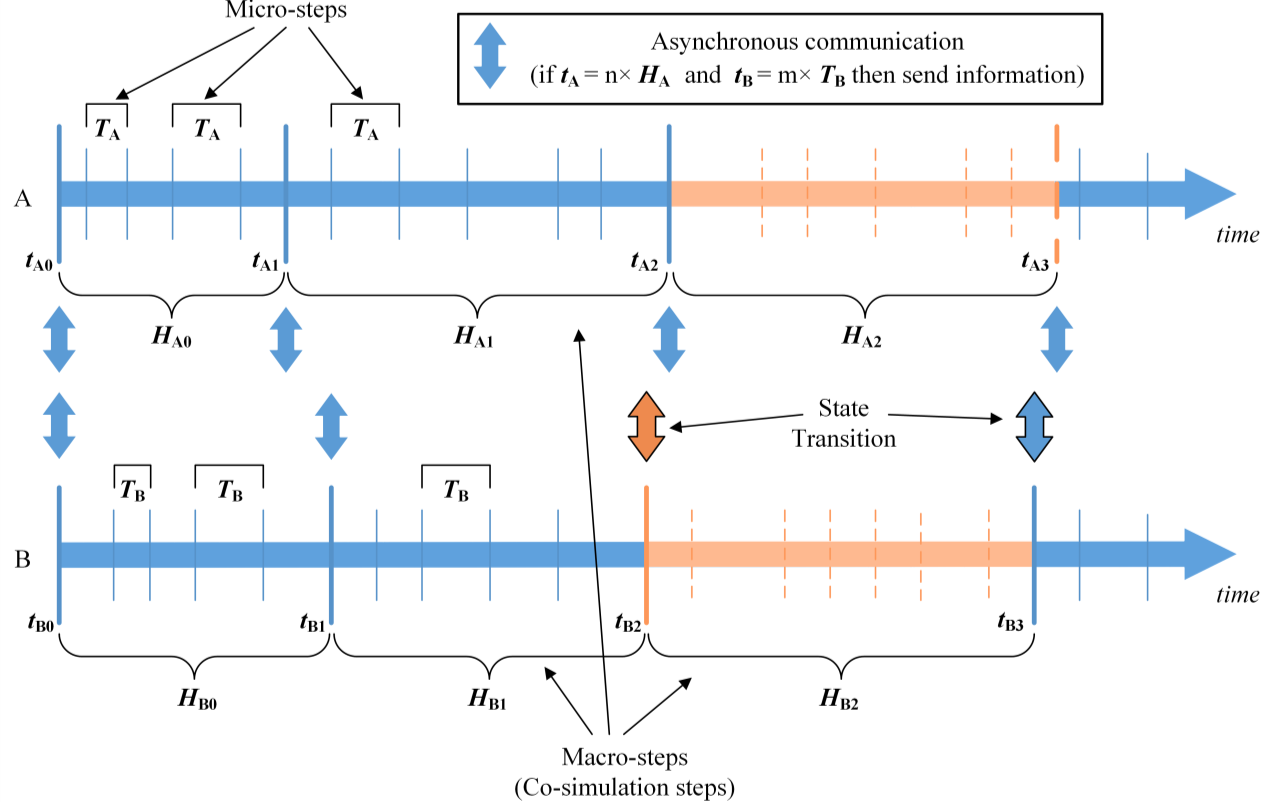
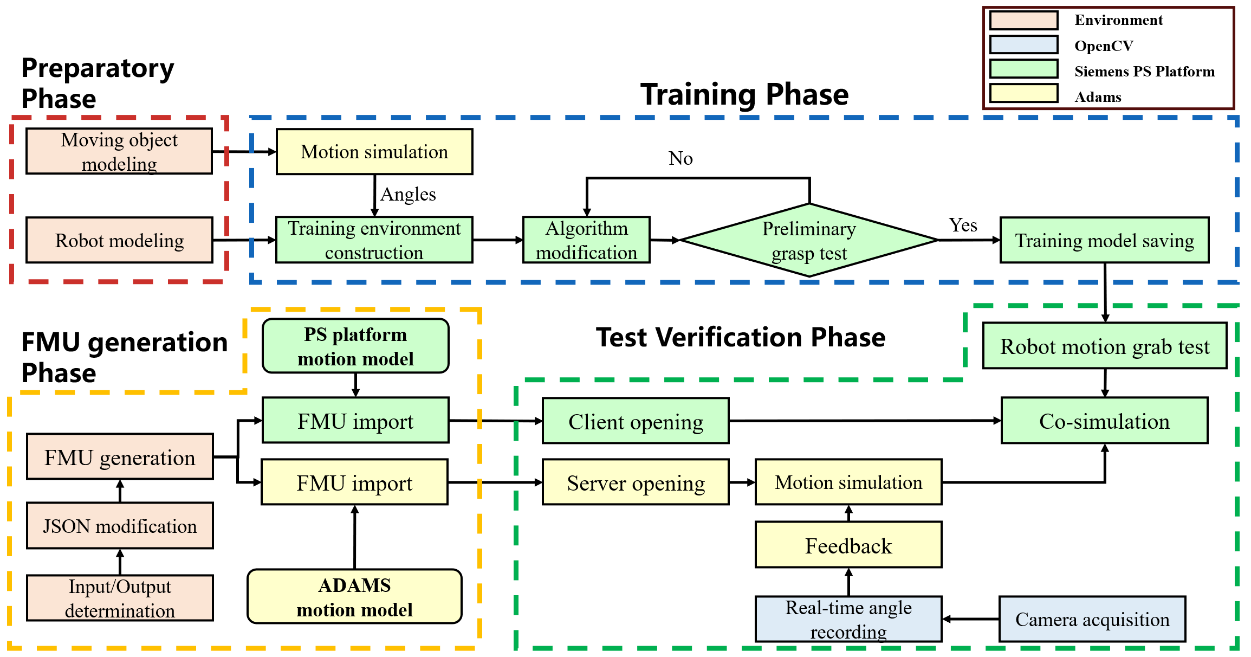
研究方法:论文提出了一种基于FMI标准的协同仿真框架,采用时间-事件混合驱动的协同仿真模型,协调不同仿真模块之间的时间和信息交换,从而提高互操作性和协调效率。FMI作为一种开放标准,主要用于在不同仿真平台和工具之间进行模型交换和协同仿真。FMI通过将所需的仿真模型封装成标准化的功能模型单元(FMU),并定义了在各种仿真平台和工具之间导入和导出FMU的接口。FMU可以被视为一个“黑箱”,仅通过接口与外部系统交互,包含模型的数学描述、参数、变量、输入和输出、事件以及求解器等信息。
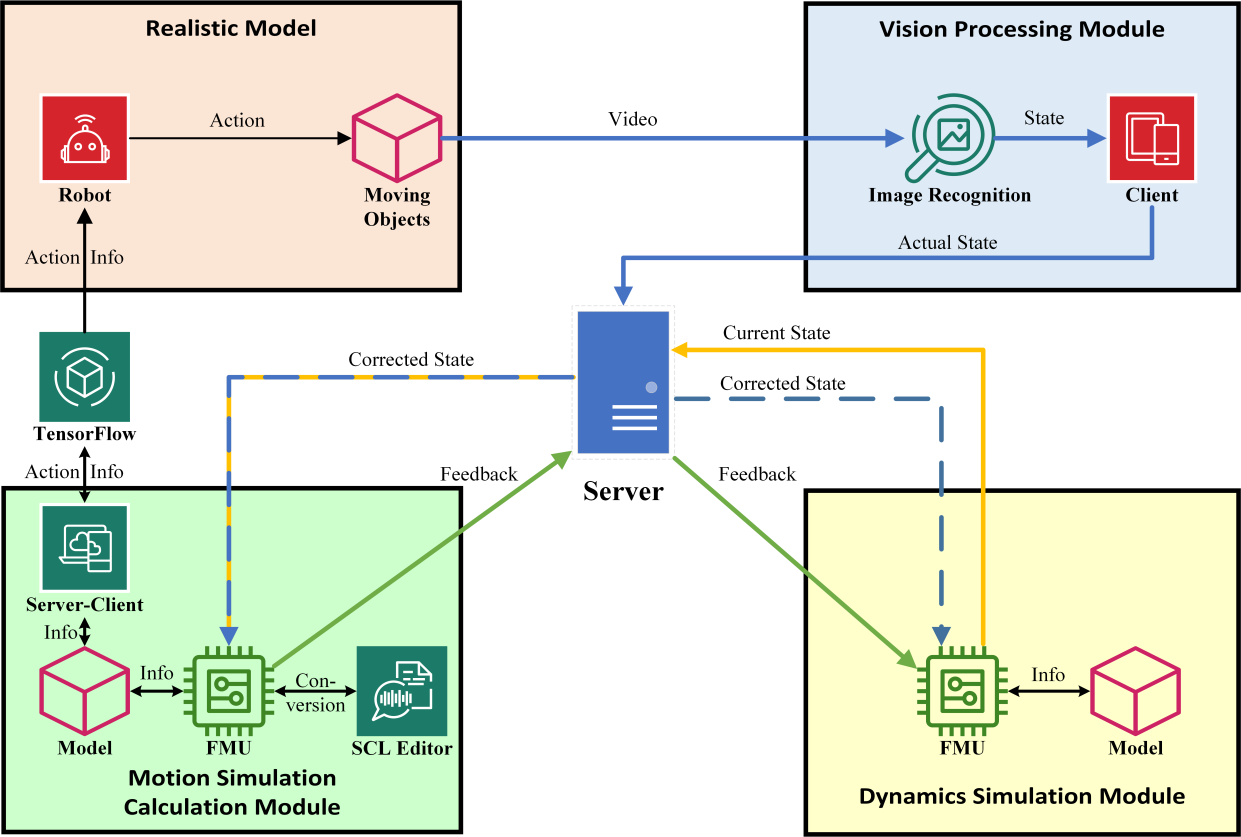
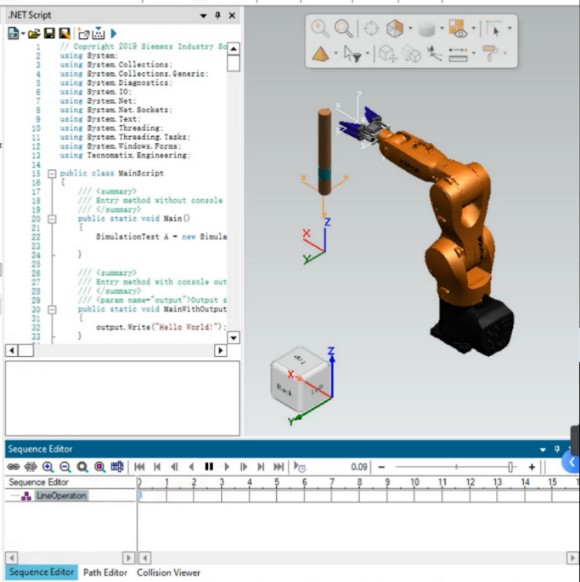
框架结构:该框架利用一个公共服务器作为信息传输的核心中继,FMU被导入到不同平台中进行同步和信息交换。系统由四个主要模块组成,其中三个模块依赖于客户端软件或平台。动态仿真模块提供虚拟环境的基本运动参数和基于初始状态的连续时间运动仿真。运动仿真计算模块主要接收外部运动数据并渲染机器人的模拟运动。机器人的当前状态和物体的实际状态作为事件标记来控制系统的启动和停止功能。视觉处理模块从物理模型中识别实时参数,帮助校正当前仿真数据,并将这些数据传输到计算模块,同时向动态仿真模块发送反馈。
技术集成:框架集成了FMI、TensorFlow和OpenCV等技术,旨在显著提高多平台仿真效率,解决同步稳定性和数据一致性的问题。这种能力有望增强机器人系统在复杂和不确定环境中的操作稳健性,支持智能抓取任务的精确和高效执行。
实验结果与贡献:实验结果表明,该框架不仅促进了高效的多平台协同仿真,还成功处理了复杂的抓取任务,展示了卓越的性能和稳定性。论文的贡献在于建立了一个通用的协同仿真框架,促进了各种仿真平台之间的无缝协同仿真,并通过在动态环境中引入深度强化学习模型,增强了机器人抓取动态物体的能力。
术语解释:
- 功能模型接口(FMI):一种开放标准,用于在不同仿真平台和工具之间进行模型交换和协同仿真。
- 功能模型单元(FMU):FMI标准中的核心组件,封装了仿真模型及其接口。
- 时间-事件混合驱动:一种仿真方法,结合了时间驱动和事件驱动机制,以提高仿真效率和准确性。
总之,这篇论文通过提出一个基于FMI标准的协同仿真框架,解决了传统机器人系统在复杂环境中的操作挑战,特别是在多平台协同仿真中的信息同步和模型重用问题。