暂无数据
用于康复和辅助的机器人手部外骨骼:最新技术综述
原标题:Robotic Hand Exoskeletons for Rehabilitation and Assistance: A State-of-the-Art
5 分
关键词
摘要
中风引起的慢性偏瘫和肌张力障碍变化是导致人手功能丧失和下降的主要原因,全球手功能障碍患者的数量正在增加,严重影响他们的日常生活活动。机器人医疗设备,如机器人手部外骨骼,已被研究用于帮助恢复和改善这些患者的手功能。与传统疗法相比,机器人手部外骨骼具有提供可控的辅助力/扭矩、记录佩戴者运动数据、提高佩戴者在康复中的主动参与和动机等优点,从而可以提高手部康复效率。本文对机器人手部外骨骼进行了系统综述。首先,介绍了人手的生物力学。接下来,提出了机器人手部外骨骼的设计概念,包括驱动器设计与配置、人机运动学兼容性以及自由度设计。此外,还描述了机器人手部外骨骼的控制策略。最后,讨论了当前可用的机器人手部外骨骼的局限性及其未来可能的研究和发展方向,为工程师和研究人员开发具有实际和可行应用的机器人手部外骨骼提供了有用的信息。
AI理解论文
该文档是一篇关于手部康复机器人外骨骼的系统综述,主要聚焦于其设计、控制策略及在人类试验中的应用。以下是对该文档的详细总结:
引言
文档首先介绍了手部康复在生物医学领域的重要性,尤其是在中风或其他神经系统损伤后的康复治疗中。传统的康复方法存在效率低、成本高的问题,因此,机器人外骨骼作为一种新兴技术,提供了一种潜在的解决方案。文档指出,尽管已有多种设计和控制策略被提出,但在提高设备的舒适性、灵活性和有效性方面仍存在挑战。
方法
文档采用了系统综述的方法,通过电子数据库检索了851篇相关文献,最终筛选出86篇符合纳入标准的研究。这些研究主要集中在手部外骨骼的设计、控制策略以及人类试验上。文档详细描述了人手的生物力学特性,包括手部的骨骼、关节、肌肉、肌腱、神经和血管的结构和功能。这些生物力学特性为机器人外骨骼的设计和控制提供了重要指导。
结果
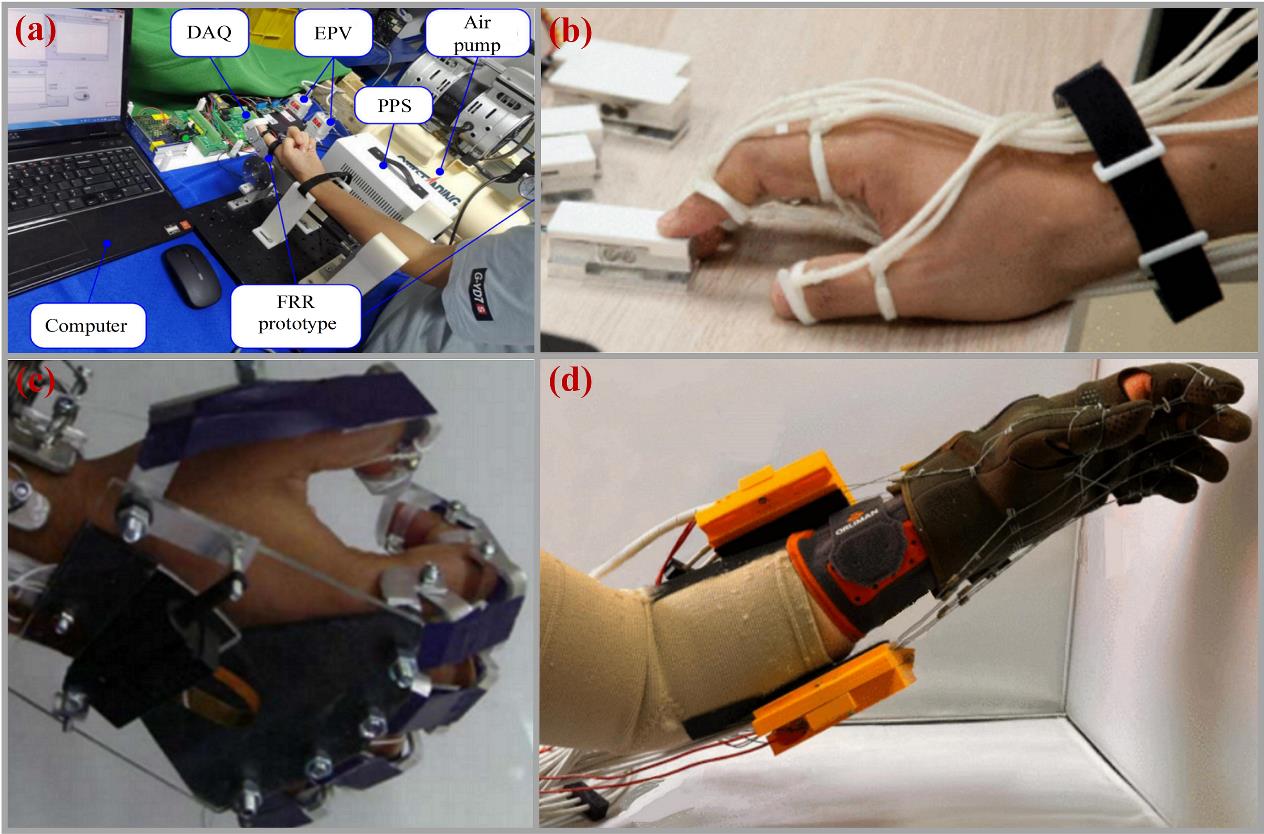
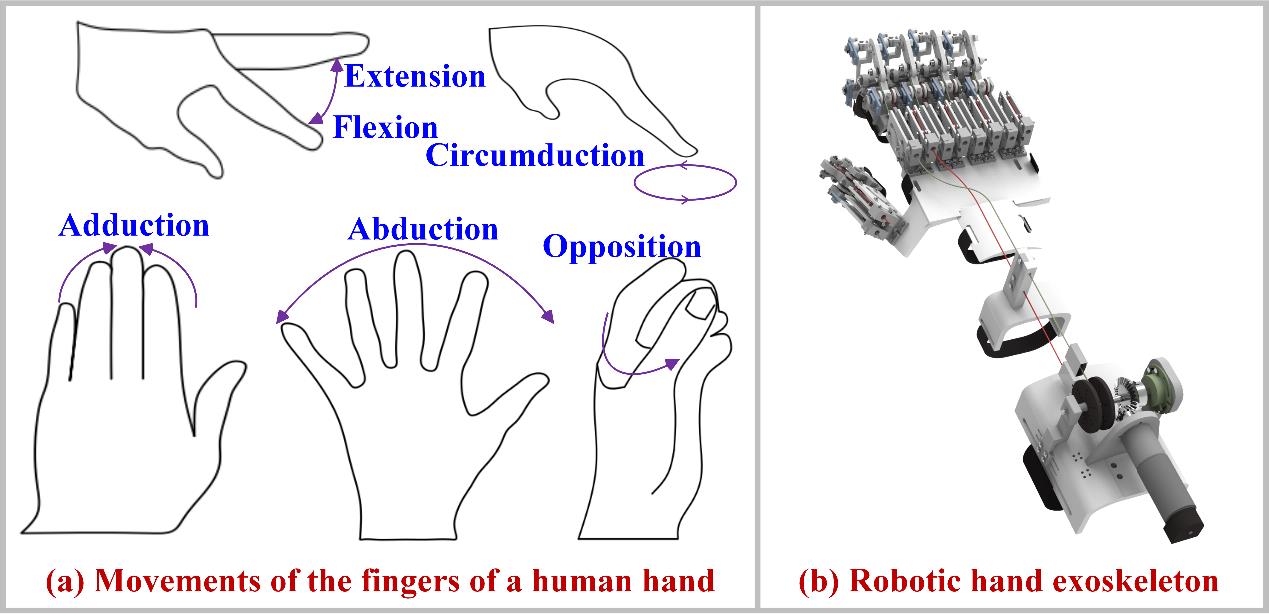
文档在结果部分使用了多个子标题来引导读者,确保科学严谨性。所有定量结果均以图表形式呈现,并附有误差条(标准差或标准误)。文档中提到的手部外骨骼主要分为电机驱动和肌腱驱动两种类型。每种类型的外骨骼都在不同的研究中得到了应用和测试,文档通过多面板图(如图2和图3)展示了这些外骨骼的设计和功能。
讨论
在讨论部分,文档分析了不同设计和控制策略的优缺点,并引用了相关文献支持其观点。文档指出,尽管在设计和控制策略上取得了一定进展,但在提高设备的舒适性和用户体验方面仍需进一步研究。文档还强调了统计分析在验证结果显著性方面的重要性。
结论
文档总结了主要方法和结果,并指出这些方法和结果在手部康复领域的广泛意义。文档最后强调,未来的研究应更加关注设备的个性化设计和智能控制,以提高康复效果和用户满意度。
复杂术语解释
- 外骨骼(Exoskeleton):一种穿戴式设备,通常用于增强或恢复人体的运动功能。
- 生物力学(Biomechanics):研究生物系统中力学原理的学科,特别是涉及人体运动的力学。
- 标准差(Standard Deviation, SD)和标准误(Standard Error of Mean, SEM):统计学中用于描述数据分布的离散程度的指标。
贡献
该文档通过系统综述的方式,全面总结了手部康复机器人外骨骼的研究现状,提出了当前存在的挑战和未来研究的方向,为相关领域的研究人员提供了重要的参考和指导。
综上所述,该文档在手部康复机器人外骨骼的设计和应用方面提供了深入的分析和见解,强调了生物力学特性在设备设计中的重要性,并指出了未来研究的潜在方向。