暂无数据
用于卫星物体探测和跟踪的新天文观测台设计:卫星机器人观测台(SRO)
原标题:New Astronomical Observatory Design for the Detection and Tracking of Satellite Objects: The Satellite Robotic Observatory (SRO)
5 分
关键词
摘要
机器人天文台(RAOs)在天体物理学/天文学的不同研究项目中提供了非常好的结果。它们在近地天体的探测、跟踪和识别中的应用有助于识别对我们安全构成潜在威胁的物体,如近地天体(NEOs)、近地小行星(NEAs)、流星和彗星,这些物体的轨迹变化可能对我们的星球造成影响。如果将天体测量技术(测量地球轨道物体的位置和轨迹)和光度测量(光曲线的变化)与在光学和近红外光谱范围内工作的新传感器结合考虑,就可以开发出一种新的天文台系统,允许在不同光谱范围内检测附近的卫星物体,并具有更明确的光学性能。本文描述了一种新型天文台的设计,该天文台应用于卫星和其他碎片物体的监视和跟踪,即卫星机器人天文台(SRO)。从天文台的一般约束条件出发,确定了设计过程,考虑了主要目标、必要的传感器以及若干技术改进,这些改进为SRO的最终配置做出了贡献。结果是设计出一种便携式天文台模型,能够同时容纳至少两个传感器以跟踪和监测卫星物体。
AI理解论文

该文档主要探讨了**卫星机器人天文台(Satellite Robotic Observatory, SRO)**的设计与开发,旨在追踪和监测地球轨道上的卫星和空间碎片。文档分为几个部分,涵盖了设计约束、方法论、设备选择、以及操作和维护等方面。
1. 设计约束与方法论
文档首先强调了设计SRO的三个基本问题:
- 目标明确:天文台的设计必须围绕其主要目标展开,即追踪和监测。
- 位置与方向选择:选择最佳的地理位置和方向,以便望远镜和传感器能够有效检测目标物体。
- 设备选择:选择合适的光学设备、传感器、安装支架、光学配件和软件,以获取并处理图像数据,如轨道参数和光曲线。
2. 设备与技术选择
文档详细描述了用于SRO的光学设备和传感器的选择。光学设备包括两种不同型号的望远镜:一个80mm口径的消色差折射望远镜(f/4.5)和一个10英寸的施密特-卡塞格林望远镜(f/10)。这些设备的组合限制了曝光时间,尤其是在捕捉低轨道卫星时。为了实现广域成像,文档建议使用Astrograph,这是一种具有非常短焦距(f/2到f/3)的广域望远镜。对于后续工作,推荐使用焦距在f/5到f/8之间的望远镜,以提高精度和范围,并能够检测更暗的物体。
在传感器方面,文档比较了CMOS和CCD相机,指出CMOS相机在性能上与CCD相机相当,甚至在某些方面更优,如更快的下载时间和更高的灵敏度。文档中提到的CMOS相机包括ZWO ASI071和ZWO ASI183,它们具有较高的分辨率和较大的格式尺寸。
3. SRO的开发阶段
SRO的开发分为三个阶段:
- 阶段1:定义目标,如检测、监测和追踪空间碎片和人造卫星,并确定这些活动是远程进行还是需要人工参与。
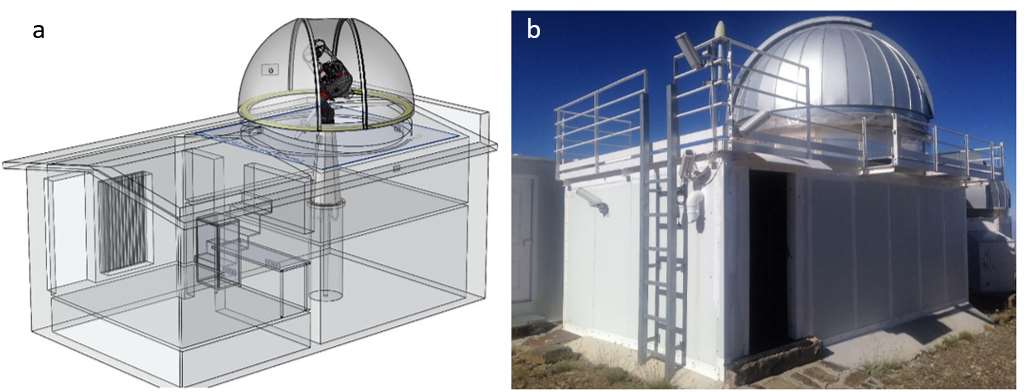
- 阶段2:解决基础设施和土木工程的需求,结合技术和科学标准,确保光学系统和传感器的正确使用和定位。
- 阶段3:制定详细的维护计划,确保SRO正常运行,并建立培训和调试计划,以保证操作人员的能力。
4. 选址测试
选址是SRO成功运行的关键。文档指出,选址测试应考虑气象条件、海拔、光污染、环境污染等因素。理想的地点应具有低湿度、低云量、少降雨和适度风速。此外,光污染和环境污染应尽可能少,天空亮度质量应不低于19 mag/arcsec²。
5. 结论与贡献
文档总结了SRO设计的关键点,强调了多种光学和传感器组合的优势,能够捕捉广域甚至全天空图像,以监测广泛的天文现象,并以更高的精度追踪其他天体。SRO被视为传统天文台的进化,适用于需要特定位置临时观测或降低开发成本的情况。
通过对SRO的详细设计和开发方法的探讨,文档为未来的天文观测提供了一个灵活且高效的解决方案,特别是在监测和追踪地球轨道上的物体方面。